ROS 1
Load local and remote ROS 1 (.bag) files, or connect directly to a live ROS 1 stack.
Live data
Install ROS 1, and make sure you're connected to the same network as the robot.
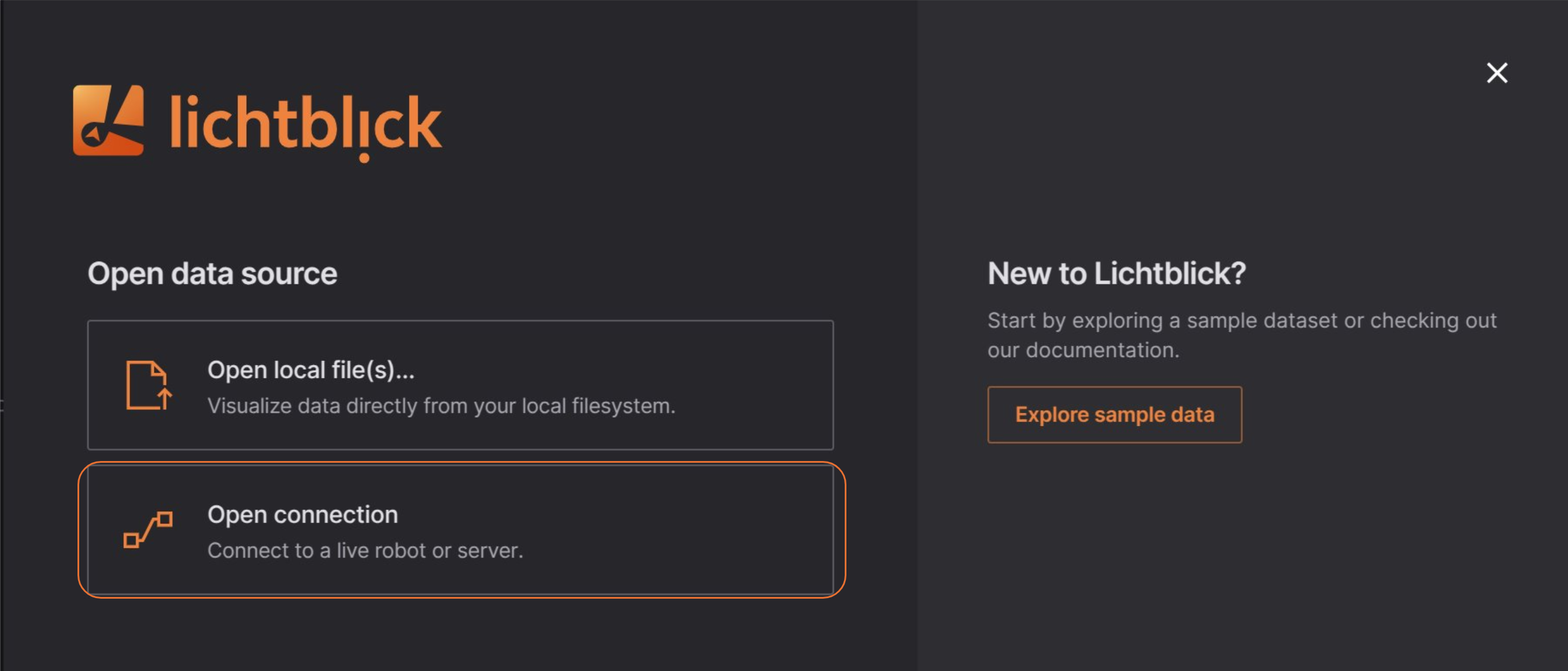
Then, in Lichtblick, select "Open connection", either on the initial welcome pop up or via the app bar menu.
Live connections
You can use Rosbridge or Ros foxglove bridge to establish a live connection between Lichtblick and ROS. This enables real-time data streaming, allowing you to interact with ROS topics, services, and parameters directly from Lichtblick.
Native
For direct access to your ROS master and nodes, connect using a native TCP (Transmission Control Protocol) connection.
Ensure you have a working ROS 1 setup and then run roscore in your terminal.
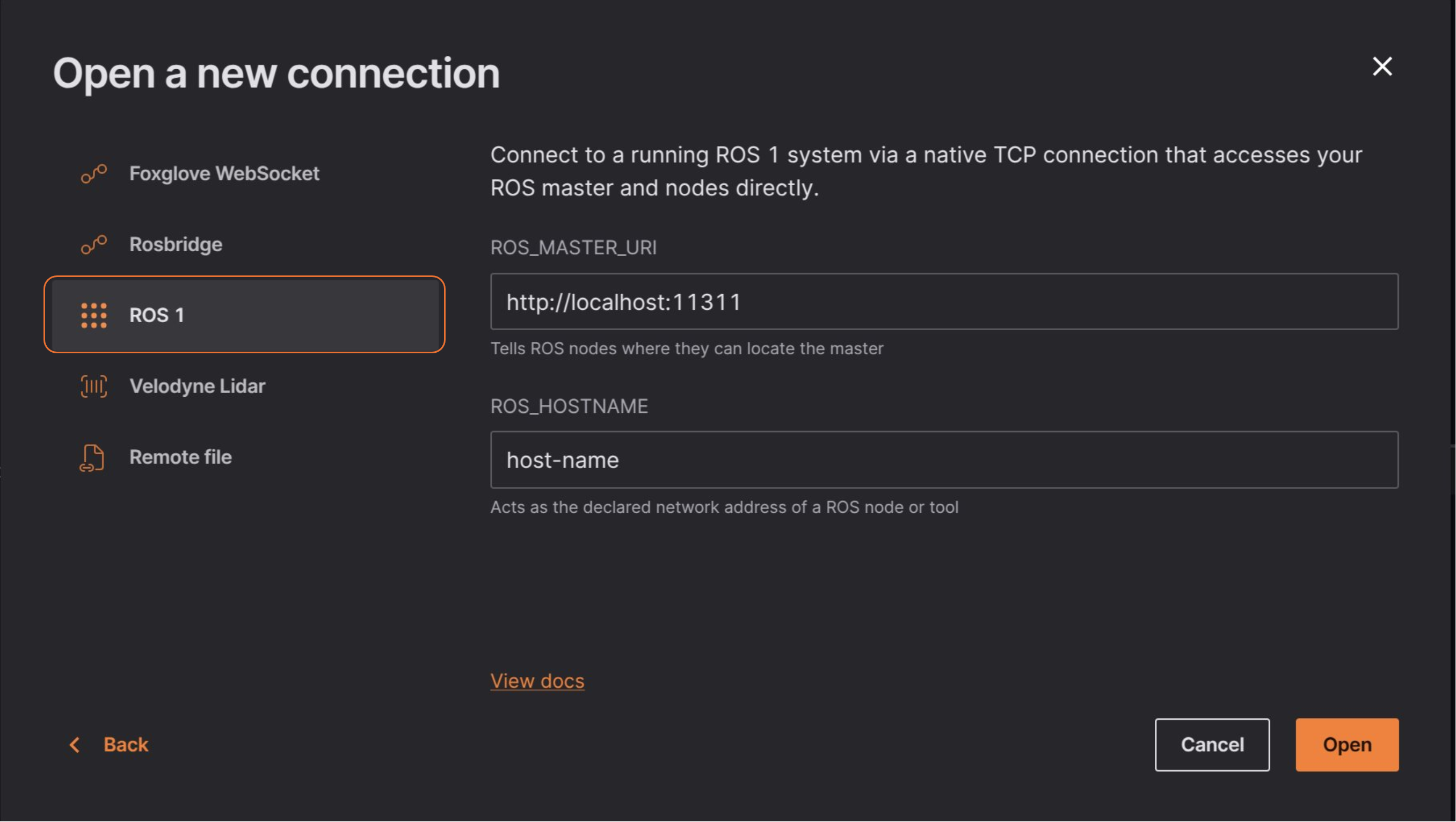
Select "ROS 1" in the "Open data source" dialog, and enter your ROS_MASTER_URI (ROS master's IP and port) and ROS_HOSTNAME:
If you encounter connectivity issues, verify that your ROS stack and Lichtblick have unrestricted network access, as ROS communicates over multiple ports.
If ROS and Lichtblick are running on different machines, refer to the ROS 1 Network Setup documentation to properly configure your environment.
Remote File
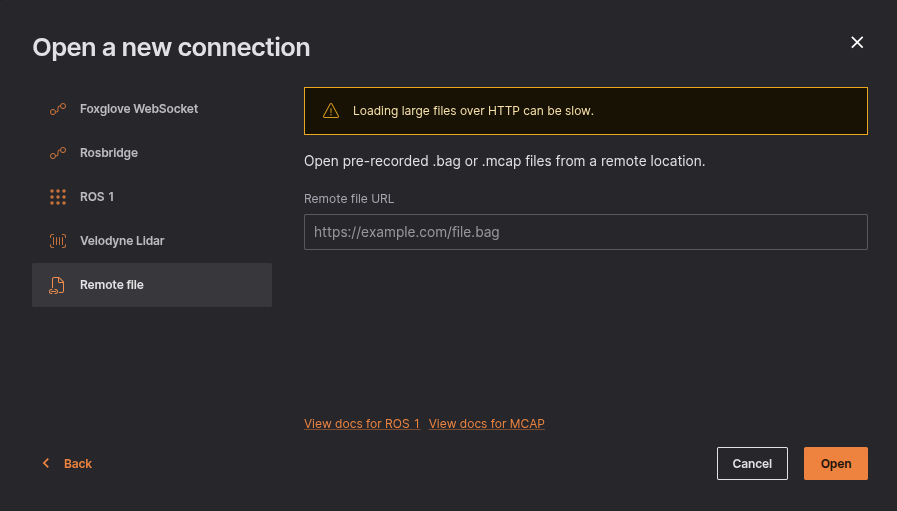
For this option just select the "Remote file" in the "Open connection" option and enter the URL to your remote .bag file.
Don't forget to set up CORS if you intend to host the files yourself and load them into Lichtblick.
Local Data
You can load local files for visualization by:
- The "Open local file(s)..." in the initial pop up or the menu on the top left;
- You can drag'n drop the files from your OS file manager;
In some parts of the documentation and codebase, you may still encounter references to Foxglove or Foxglove packages. These references are remnants of Lichtblick's origins as a fork of the Foxglove project. While Lichtblick is actively working to remove dependencies on Foxglove code and replace these references, this effort is still ongoing.
We appreciate your patience as we continue to refine and align the platform with Lichtblick's independent development goals. If you have any questions or encounter issues related to these references, please reach out to our support team for assistance.