Rosbridge
The rosbridge package enables communication between ROS 1 or ROS 2 and external applications via a websocket connection. It allows non-ROS systems, including web applications, to interact with ROS topics, services, and parameters.
Overview
Rosbridge provides a websocket-based API for sending and receiving ROS messages over the network. It is designed for general-purpose communication, enabling integration with web applications, cloud services, and custom remote interfaces.
Key features:
-
Supports ROS 1 and ROS 2
-
Implements the rosbridge_protocol for structured websocket communication
-
Enables non-ROS clients to subscribe, publish, and call services
-
Allows remote monitoring and control of ROS systems from web applications
Connecting
A Rosbridge connection uses a standardized protocol to link Lichtblick with your ROS master over websockets. While it does require running an additional ROS node rosbridge_server, it is a good option if a network firewall separates ROS and Lichtblick, as it minimizes port exposure.
To open a Rosbridge connection, you need to have installed rosbridge-suite:
$ sudo apt install ros-noetic-rosbridge-suite
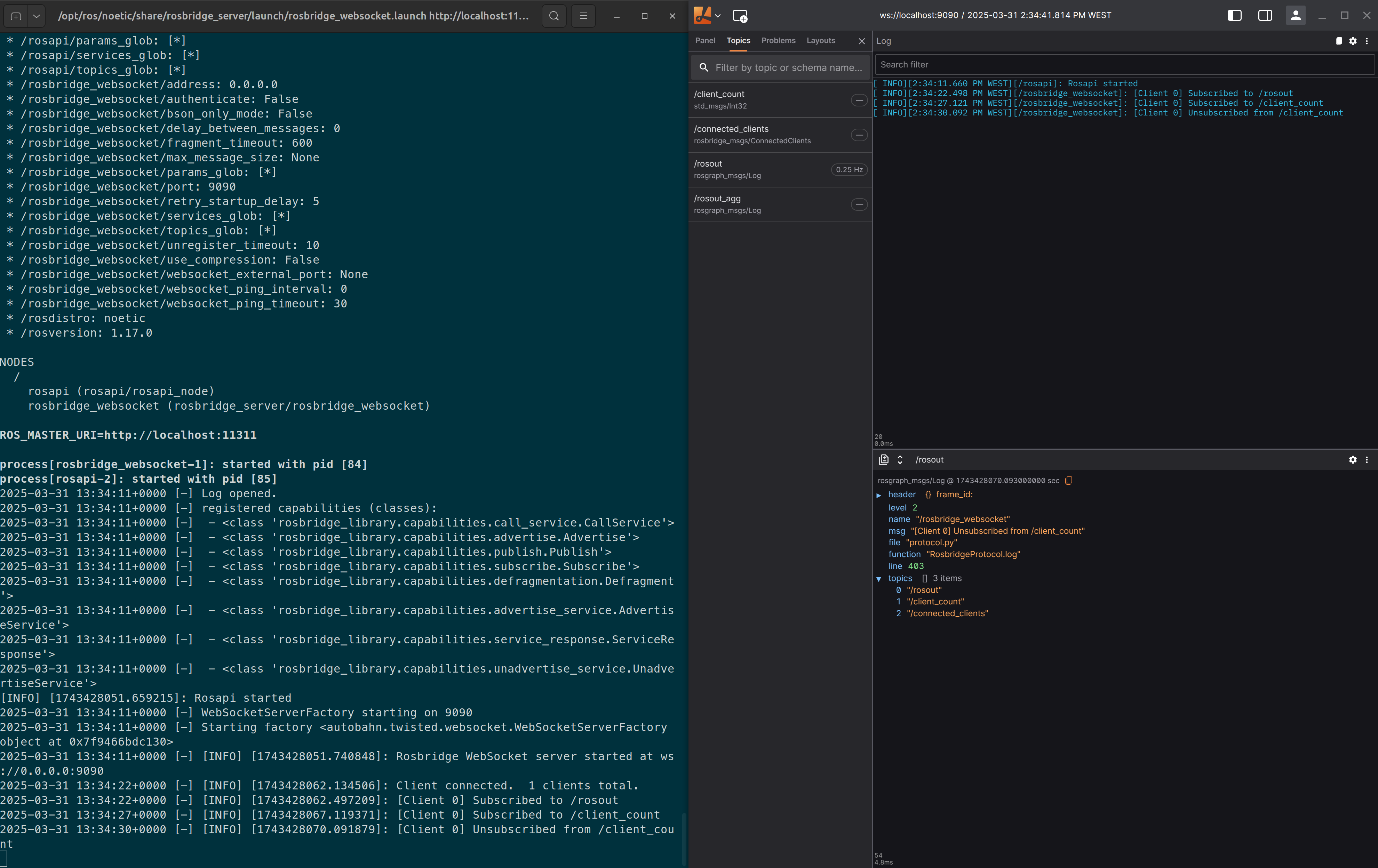
Next, start the websocket server, and review the command printout to determine the port it is listening on (e.g. ws://0.0.0.0:9090):
$ roslaunch rosbridge_server rosbridge_websocket.launch
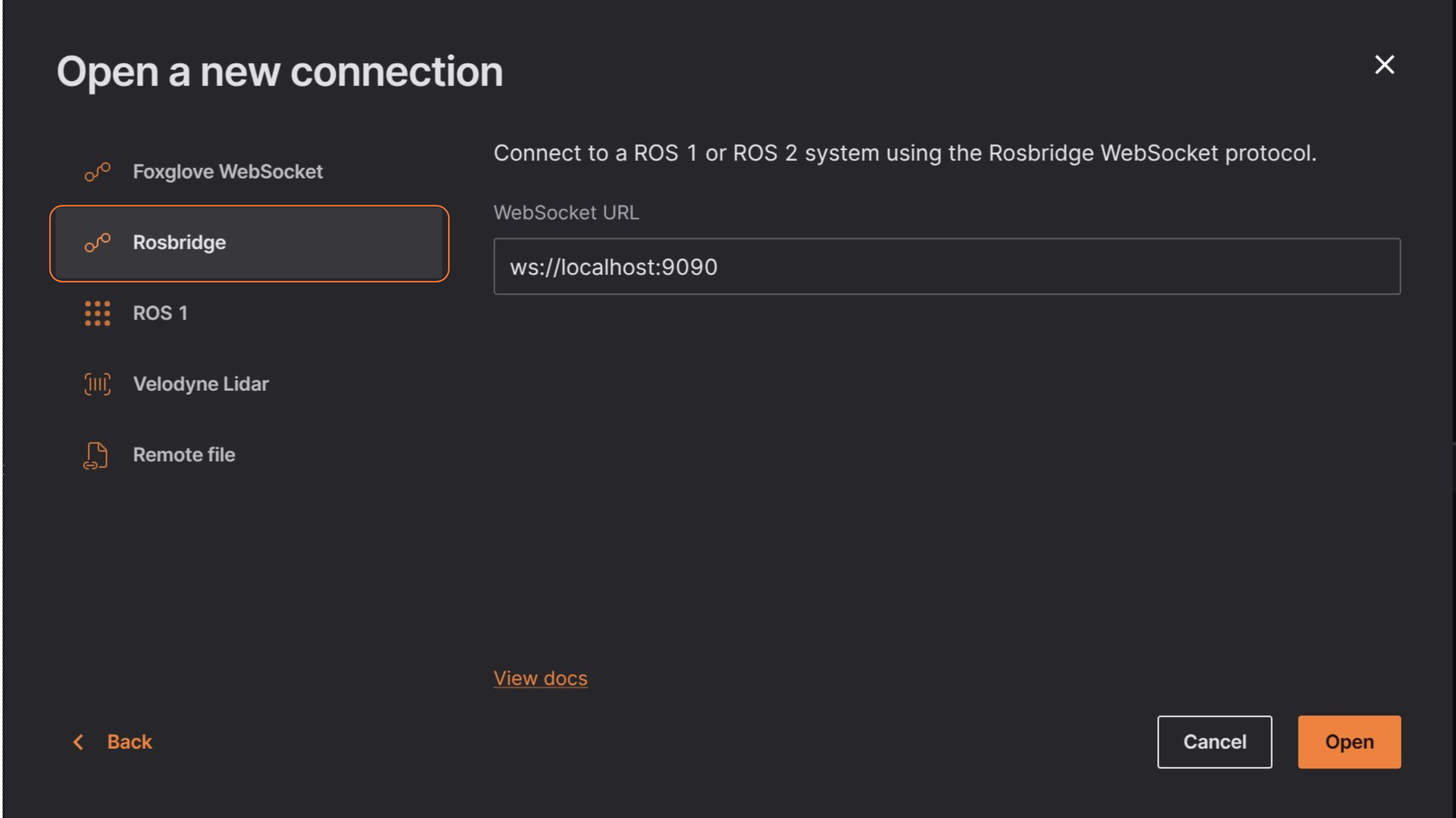
Finally "Open connection" in the "Open data source" dialog, select "Rosbridge" and then enter the URL to your Rosbridge server:
To test if everything is working well, you can check the topics tab on the left sidebar.
Example connection
As you can see below this enables real-time communication between ROS and Lichtblick using rosridge websocket.
In the example, the ROSBridge server runs inside a Docker container, exposing a websocket interface that Lichtblick can connect to. Data is exchanged by publishing and subscribing to ROS topics via websocket messages, allowing seamless integration between ROS and external applications.